International Journal of Scientific & Engineering Research, Volume 4, Issue 9, September 2013
ISSN 2229-5518
557
Wi-Fi Location Tracker System
Mukesh Bathre1, Alok Sahelay2
Abstract: The purpose of this paper is to create a platform independent, software-only, indoor geolocation solution. System utilizes the existing 802.11b Wireless Local Area Network infrastructure without using the GPS or proprietary tags. System is design using object-oriented techniques and implemented in Java with platform independent modules clearly abstracted. The project illustrates a simple path and location tracking system within an organization based on its available infrastructure of Wi-Fi networks. The location tracking algorithm compares runtime signal strength values of mobile device to pre-recorded cali- bration values that provide an approximate determination of the location in the service area and by using the histories of access points used by mobile device system provide moved path of the mobile device, and is also able to track multiple objects simultaneously. In our work we use web services for location ser- vices to enable queries and manage the path and location of the mobile node.
Index Terms: Indoor Positioning, WiFi Network, Mobile Node, Location Based Services, Tracking Systems, Wireless LANs, Signal Attenuation.
—————————— ——————————
Wireless networks have become a critical component of the networking infrastructure and are available in most corpo- rate environments (universities, airports, train stations, hospi- tals, company Buildings etc) and in various commercial build- ings (cafes, restaurants, cinemas, shopping centres, etc) [1, 2]. Path and location tracking are one of the main interesting and fast growing applications in wireless communications. The developments of such systems have interested many research, industrial and government bodies with solutions that range in scale and accuracy. Wi-Fi location tracker systems use the popular 802.11b network infrastructure to determine the user location without using any extra hardware. This makes these systems attractive in indoor environments where traditional techniques, such as Global Positioning System (GPS) fail. In order to estimate the user location, wireless Ethernet devices measure signal strength of received packets. This signal strength is a function of the distance and obstacles between wireless nodes and the access points. Moreover, the system needs one or more reference points (Access Points) to measure the distance from. Unfortunately, in indoor environments, the wireless channel is very noisy and the radio frequency (RF) signal can suffer from reflection, diffraction and multipath effect, which makes the signal strength a complex function of distance.
During the training phase, the system constructs the wire- less-map. In the estimation phase, the vector of samples re- ceived from each access point is compared to the wireless-map and the “nearest” match is returned as the estimated user loca- tion [3].
In this section first, we describe several location sensing systems and then we describe needs of developing new sys-
————————————————
Alok Sahelay is currentl working as Lecturer in Information Technology
Department in Oriental College of Technology, Bhopal(MP), India PH-
917566064287. E-mail: aloksahelay@gmail.com
tem.
Global Positioning Systems (GPS) make use of 24 satellites orbiting the earth in geosynchronous orbit that transmit their position and time of day to any device on the Earth's surface that happen to be listening. A GPS device, through triangula- tion of multiple signals received and determination of propa- gation is able to accurately determine a user’s location to with- in a meter. The problem with GPS is that the device must have an obvious line of sight among itself and the satellite. This means the technology is unusable in heavily forested areas, urban environments with tall buildings and indoor environ- ments [4, 5].
Cellular networks use location management techniques to track mobile node. Location Management essentially involves two processes, location update and paging. But cellular systems are not hold through organizations and only work with mobile phones and have greate uses charge [6, 7].
An active badge location system uses infrared technology (IR) to transmit data. Associatea of staff wear badges that transmit signals given that information about their location to a centralized location service, through a network of sensors. Active badge approach is to ‘tag’ a person and try to locate the tag. Active Badges have difficulty in locations with fluorescent lightning or direct sunlight because of the spurious infrared emissions these light sources generate and it does not work in closed room [8, 9].
Active bat use ultrasound technology to transmit signals to the receivers that are installed at some intervals on the ceil- ing. Three receivers take the time of propagation of the ultra- sound from the bat. Then by triangulation the position of the bat can be determined in three dimensions. Scalability, ease of deployment, and cost are disadvantages of this approach [10].
Computer vision is concerned with the theory for building artificial systems that obtain information from images.This is a
IJSER © 2013
International Journal of Scientific & Engineering Research Volume 4, Issue şǰȱ -2013
ISSN 2229-5518
558
feature-based tracking system for detecting vehicles under the challenging conditions. Instead of tracking entire vehicles, vehicle features are tracked to make the system robust [11].
Easy living uses two sets of color stereo cameras for track- ing multiple people during live demonstrations in a living room. The stereo images are used for locating people, and the color images are used for maintaining their identities [12].
Smart Floor system is used for biometric user identifica- tion based on footstep profiles. These uses a floor tile with force measuring sensors and are using the data gathered as users walk over the tile to identify them [13].
Radar is a system that uses electromagnetic waves to identify the range, altitude, direction, or speed of both moving and fixed objects. Generalizing RADAR to multi-floored buildings or three dimensions presents a nontrivial problem [14, 15, 16]. Also sensor networks [17, 18] can be installed as a small RF device to generated signals to be interrupted by applications
approximate 1/(range^3.5) power rule instead of the
1/(range^2) in the free space loss formula then the propaga-
tion loses can be predicted with the following relationship
![]() ……3
……3
D – is the distance in meters and 40 is a constant that in- cludes both the output power and the static cumulative gains and losses. (802.11 tracking quote) Because this the value 40 may not be the same for all situations, it is substituted by a constant variable “V”.
𝑷𝒂�𝒉 𝑳��� (𝒅�) = � + 𝟑𝟓 ∗ 𝐥𝐨𝐠(𝑫)
……4
When a signal propagation model is introduced to de- scribe the attenuation process, different building layouts should be taken into consideration as well as large-scale path loss [20].
𝑷(𝒅)[𝒅�𝒎) = 𝑷(𝒅)[𝒅�𝒎] − �� 𝐥𝐨𝐠 ( 𝒅 ) − ∑𝑷 ��𝑭(�) −
𝒅�
or user carried devices.
∑� � 𝑭�𝑭(�)
...…5
All the system described above, either requires extra hardware or it does not work inside of building. So address this problem, we have developed a software based location tracker system.
Relationship of physical position and received signal strength at different distances away from access points or hotspots is a key criterion for computing user's position in WLAN. The most basic radio wave propagation is called the free space loss, as with any signal loss it is due to absorbing, diffracting, obstructing or refracting. The formula used for free space loss calculation is
Where P (d) is the signal strength in decibels at a distance d from the transmitter. d0 is a reference distance introduced to normalize the path loss. The parameter n is the mean path loss exponent, which indicates how fast path loss increases with distance. P and Q are number of walls and floors between the transmitter and receiver, while WAF (p) and FAF (q) are termed wall attenuation factor and floor attenuation factor respectively.
Received signal = (transmit power) - (loss between transmitter
and antenna) + (transmit antenna gain) - (path loss)-(multi path and obstruction loss) + (receive antenna gain)-(loss be- tween antenna and receiver)
……6
![]()
![]()
���� ��𝑎𝑐� 𝑙��� = 𝐹𝑆𝐿 = ( ) = ( )
![]()
The concept of Wi-Fi LTS is inspired by the usage of ac- cess points installed within an organization to provide wide area network access to mobile users. Apart from providing a
…1 connection access point for mobile devices, access points also
Where λ is the signal wavelength, f is the signal frequen- cy, d is the distance or radius of the signal from the transmit- ter, and c is the speed of light in the signal transmission medi- um the units used should be consistent, e.g., and R in meters, and c in meters per second [19].
The more useful representation of this formula is in terms of dB that is based on Hz and meters
……2
If the indoor propagation of the 2.4 GHz signal follows an
have their added value of identification, since every access
point has a unique id presented in its MAC address of the port that connects it to the infrastructure. The collected information of access points signal coverage, resulting from mobile nodes association inquiries enable the implementation of location
and path tracking concepts.
Our system uses architecture that provide three different
solution i.e. Where Am I? (WAI), Where Are You? (WAY), Where Are They? (WAT)
WAI: this approach allows the mobile node to determine its own location.
WAY: this approach allows two mobile nodes that implement WAI to query each other for their location. WAT: this ap- proach allows an administrator to monitor the location of mul-
IJSER © 2013
International Journal of Scientific & Engineering Research Volume 4, Issue şǰȱ -2013
ISSN 2229-5518
559

tiple mobile nodes.
ClientInfoDB
Moving
Information Agents
to keep as a movement log. The information is of which access point(s) the node is able to receive a signal and the signal strength of that access point. To get the signal strength of mo- bile node, we used a netstumbler. Netstumbler [21] store the signal strength of mobile node in to file, update file infor- mation at regular interval and MIA retrieve that information and sends back to path and location tracking service module at regular interval. The idea of using a moving information agent instead of getting the information from an access points itself is because we want to get all the access points signals that the mobile node gets from that location.
Location Reference
Table
Movement
Logs
Path and Location Tracking Services
Registered
Mobile
These services work as a mobile node application that gets the information from the path and location tracking service and show the location information on the user's mobile device.
This data is updated frequently from the mobile nodes when the new movement information is detected by the mov- ing information agent. The information of this log is used to determine the movement paths of the mobile nodes. This in-
Figure 1. Architecture of LTS.
We implemented a location system that are based on structured components and are designed to keep the related information of the signal and location in order to determine the location of where a mobile device is located. The key de- sign concept is to utilize the existing systems by not adding any new devices to the network but use what is already in existence within the organization network. To implement this system we use JSP technology for web service and swing to draw map. The main structure of our path and location track- ing system is illustrated in Fig.1. It consists of:
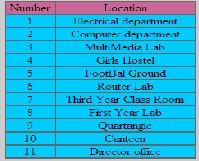
This table stores the pre surveys data that will be used as references with the inquiry information for the path or loca- tion. This is done by saving the records of the separate divided areas of signal strength as received from the access points. We store signal strength of mobile node from access point and their latitude and longitude (X, Y) information. This infor- mation is also used as the display coordinate which shows the location and path of the node on the mobile device applica- tion. The accuracy of the location depends on the size of the grid that is kept in the table.
This table stores mobile nodes related information such as name, login id, password, address, ip address, mac address, and phone no, email id etc that are used to uniquely identify the device.
These agents are located in every participated mobile node. Their function is to get the movement related infor- mation from the node environment and send it to the system
formation will be requested and used in the calculation pro- cess by the path and location tracking services module imple- mented in the location references table.
This service resides in the system and serves as a path and location tracking information agent for any queries from mo- bile nodes or any other application. This service also manages the movement log of each registered mobile node. We used triangulation algorithm to show the mobile node location in to map.
Step 1: Get signal strengths and ssid of access points.
Step 2: If we get signal strength of mobile node from one or
two access point then used strongest signal strength or closest
access point method to determine the location. Get the posi-
tion of access point from location reference table and draw the
map.
Step 3: If we get signal strength of mobile node from three access point then we get these APs’ coordinates by querying a
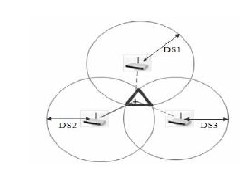
location reference table with the AP’s id. We can estimate the distances between the WiFi-mobile node and the APs with the signal strength information, and name the results with DS1, DS2, and DS3 respectively.
IJSER © 2013
International Journal of Scientific & Engineering Research Volume 4, Issue şǰȱ -2013
ISSN 2229-5518
560
Figure 2.Triangular positioning
Step 4: Draw three circles with the centers set as the AP’s co- ordinates, and the radiuses set as DS1, DS2 and DS3 respec- tively.
Step 5: Taking any two of these three circles into account, there are two possible situations:
1. Two circles cut each other. Then we get two intersec- tion points. Particularly, if two circles are tangential to each other, the tangent point should be taken into ac- count twice.
2. Two circles stay apart from each other and do not cut.
Then we connect the centers of these two circles with a straight line, which will cut these two circles respec- tively and generates two intersection points.
Figure 4.Location map of mobile node.
3.
Step 6: Perform the same process on every two of these three circles, and we will get six intersection points (p1-p6).
……7
(X, Y) stands for the estimated coordinate of the Mobile node.
Step 7: The estimation error Er is measured by absolute dis- tance.
![]() ……8
……8
Where (X, Y) the actual is coordinate of the WiFi- Mobile node.
Step 8: Draw these x and y position in to map.
We have tested this paper on test bed, where its shows the mobile node location in map. Figure 3 shows the mobile node location information in textual format.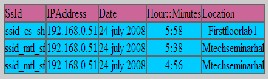
Figure 3.Mobile node location information
Figure 4 shows the mobile node location and path infor- mation. Red circle indicate mobile node current position, green circle indicate second last position and dark blue circle indicate the third last position. By looking at table and map we can conclude the movement path of mobile node. Here path movement is from Mtech seminar hall to mtech seminar hall then move to its current position first floor lab 1.
Figure 5.Reference table for location map.
This paper illustrated a simple path and location tracking system within an organization which is build, based on the already implemented Wi-Fi network infrastructure. This sys- tem uses the client server architecture and is also architecture neutral system. By using signal strength and histories of access points used by a mobile node and applying triangulation method, we can determine roughly the location in the services area and also the moved path of the mobile node. We uses web services for the provision of location based services that enable queries and manage the path and location of the mobile node. However the position of the mobile node that results from our system is not as accurate as those of GPS based sys- tems. Nevertheless we enable a value added service to the existing Wi-Fi infrastructure. The accuracy of our proposed Path and Location Tracking System hugely depends on the precision of the signals detected, the size of the divided area, and the services area of one access point.
We plan to simplify the pre-surveys information process by using the map of the services area to help us generate Loca- tion References Table. We are still in the process of finding an efficient method of interpreting which locations are those that a mobile node is less likely to be located. We can also use wi- max instead of wi-fi and locating mobile device in 3-D map instead of 2-D map.
IJSER © 2013
International Journal of Scientific & Engineering Research Volume 4, Issue şǰȱ -2013
ISSN 2229-5518
[1] Dr. M.A. Ansari, Sherjeel Farooqui and Ansar-Ul-Haque Yasar, “Low Cost Solution for Location Determination of Mobile Nodes in a Wire- less Local Area Network,” IEEE ,2005.
[2] C. Schmandt and N. Marmasse, "User-centered location awareness," IEEE Computer, vol.37 (10), page 110 - 111, 2004.
[3] A. Mingkhwan, “WI-FI Tracker: An Organization Wi-Fi Tracking System,” IEEE Computer Society CCECE/CCGEI, page 231-234 , May 2006.
[4] Asimina Vasalou, Anne-Marie Oostveen , Adam N. Joinson, “A case study of non-adoption: the values of location tracking in the family”, Proceeding CSCW '12 Proceedings of the ACM 2012 conference on Computer Support- ed Cooperative Work, Pages 779-788, ACM New York, NY, USA 2012.
[5] Lu Tieding ; Zhou Shijian ; Chen Xijiang, “A Number of Issues about Con- verting GPS Height by BP Neural Network”, Biomedical Engineering and Computer Science (ICBECS), Page(s): 1 – 4, IEEE 2010.
[6] C. A. Gogate, B. S. Sagaidev, and S. G. Vaidyanathan, "Monitoring and Transmission of Heavy Vehicle Parameters using fixed Cellular Terminal ," In Proceedings of IEEE 60th Vehicular Technology Con- ference, page 4100 - 4102 Vol. 6, 2004.
[7] Wang S.-H., Chang R.-S., Tsai S.-L., “Tracking objects using hexa- gons in sensor networks “,Volume: 2 , Issue: 4, Page(s): 309 – 317, IEEE 2012.
[8] Roy Want, Andy Hopper, Veronica Falcao and Jonathan Gibbons, “The Active Badge Location System,”, Olivetti Research Ltd. (ORL) Cambridge,1992.
[9] Kieran Mansley, David Scott, Alastair Tse and Anil Madhavapeddy, “Feedback, Latency, Accuracy: Exploring Tradeoffs in Location Aware Gaming,” Sig comm workshops, Aus 2004.
[10] M. Tavakoli and S. Yamamoto, "Human Tracking Devices: the
Active Badge/Bat and Digital Angel / Verichip systems", ECE
399, Project paper #1, Oregon State University, 2003.
[11] Wei-Lwun Lu, Kenji Okuma, James J. Little, “Tracking and recogniz- ing actions of multiple hockey players using the boosted particle fil- ter”, Image and Vision Computing, Volume 27, Pages 189–205, Else- vier 2009.
[12] Pan Wei ; Liu Zhizhan ; Zou Yi, “Multi-person location and tracking method based on BP neural network” Conference on Cybernetics and Intelligent Systems, Page(s): 28 – 31, IEEE 2008.
[13] Robert J. Orr and Gregory D. Abowd, “The Smart Floor: A Mecha-
nism for Natural User Identification and Tracking, ” April 2000.
[14] P. Bahl and V.N. Padmanabhan, “RADAR: An In-Building RF-based User Localization and Tracking System,” Microsoft Research INFO- COM 2000.
[15] Nissanka B. Priyantha, Anit Chakraborty, and Hari Balakrishnan.
“The Cricket Location-Support System,” 6th ACM International Con- ference on Mobile Computing and Networking (ACM MOBICOM), Boston, MA, August 2000.
[16] D.-B. Lin, R.-T. Juang, and H. P. Lin, "Mobile Location Estimation and Tracking for GSM Systems Personal, Indoor and Mobile Radio Communications," In Proceedings of 15th IEEE International Sympo- sium on, page 2835 - 2839 Vol.4, 2004.
[17] R. Gupta and S. R. Das, "Tracking Moving Targets in a Smart Sensor Network," In Proceedings of IEEE 58th Vehicular Technology Con- ference, VTC -Fall, page 3035 - 3039 Vol.5, 2003.
[18] A. Hoover and B. D. Olsen, "Sensor Network Perception for Mobile Robotics," In Proceedings of IEEE International Conference on Robot- ics and Automation, ICRA '00, Page 342 - 347 vol.1, 2000.
[19] Solovey, A. ; Wasson, M. ; Mittra, R., “Free space transmission loss measurement of magneto-dielectric materials: Solution uniqueness and measurement tolerance tradeoffs”, Microwave Conference (EuMC), Page(s): 1587 - 1590,IEEE 2010.
[20] Interlink Networks, Inc., “A Practical Approach to Identifying and Tracking Unauthorized 802.11 Cards and Access Points,” 2002, http://www.interlinknetworks.com/graphics/news/wireless_detec tion_and_tracking.pdf .
[21] NetStumbler v0.4.0 http://www.stumbler.net/
561
IJSER © 2013