A simple strategy widely used in industrial control is PID controller [4]. A PID Controller is being designed for a higher order system. Fig.1 shows the simulink diagram of the PID Controller with unity feedback.

International Journal of Scientific & Engineering Research, Volume 5, Issue 1, January-2014 2040
ISSN 2229-5518
1Deparment of Electrical & Engineering, SRMSCET, U.P, India Hritu.iet@gmail.com
2Deparment of Electrical & Engineering, SRMSCET, U.P, India er.kritika@gmail.com
3Deparment of Electrical & Engineering, SRMSCET, U.P, India sanskritipatel01@gmail.com
4Deparment of Electronics & Instrumentation, MJPRU, U.P, India rkm96ei42@gmail.com
Abstract- Measuring the flow of liquid is a critical need in many industrial plants. The aim of this paper is to do the comparative study of conventional PID, fuzzy logic controller and PID-Fuzzy controller in the area of liquid flow control. In this paper, performance analysis of conventional PID, fuzzy logic and PID-Fuzzy has been done by the use of MATLAB and simulink and in the end comparison of various time domain parameter is done to prove that the PID- Fuzzy logic controller has small overshoot and fast response as compared to PID controller. PID controller is the most widely used control strategy in industry. The popularity of PID controller can be attributed partly to their robust performance and partly to their functional simplicity. In this paper, the response of the PID and PD controller is oscillatory which damage the system. But the response of the fuzzy logic controller AND PID-Fuzzy is free from these dangerous oscillation in transient period. Hence the Fuzzy logic and PID-Fuzzy logic controller is better than the conventionally used PID controller.
Keywords - Fuzzy Logic Controller, PID Controller, Matlab/ Simulink.
I.INTRODUCTION
Flow control is critical need in many industrial processes. The control action of chemical industries maintaining the controlled variables. In this paper, we control the flow via three method: PID, Fuzzy Logic Controller and PID-Fuzzy. PID control is one of the earlier control strategies [1]. PID controller has a simple control structure which is easy to understand but the response of PID controller is not fast. To overcome these problems we use fuzzy logic and PID-Fuzzy Controller. Performance analysis of PID and Fuzzy Logic Controller has been done by the use of MATLAB and simulink. Comparison of various time domain parameters is done to prove that the Fuzzy Logic Cotroller has small overshoot and fast response as compared PID controller.
II.CONTROL SYSTEM OF FLOW PROCESS STATION
The flow process station consist of a reservoir from which the liquid is transferred to the overhead tank by means of a motor [9]. Flow is the process variable of this process. The desired flow is set by the user. An orifice meter measure the flow rate of the liquid. Differential pressure transmitter senses the pressure difference and it is calibrated to provide the correct flow rate [9].DPT now sends the measured value to the process computer where controller is employed. After execution of the fuzzy
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 1, January-2014 2041
ISSN 2229-5518
simulation in MATLAB, the control variable is given to the final control element. The objective of this paper is to maintain the
desired flow rate.
A. Design of PID Controller
III. DESIGN CONSIDERATION
A simple strategy widely used in industrial control is PID controller [4]. A PID Controller is being designed for a higher order system. Fig.1 shows the simulink diagram of the PID Controller with unity feedback.
Figure.1. simulink diagram of PID Controller
The response of this technique is not fast and reliable. To overcome these problem we proposed the Fuzzy Controller sothat the closed loop system exhibit small overshoot and settling time with zero steady state error.
U(t) = KP e(t) + KP/ TI 𝑒(𝑡)𝑡0dt + Kp TD de(t)/dt
Where,
U(t) = Control signal applied to plant
KP = Proportional gain
K I = Integral gain
KD = Derivative gain
The selection of these KP , K I and KD values selects according to the desired response.in general the dependency shows in the following table.
Table I. Effect of increasing parameter values independently on the response
Parameter | Rise Time (Tr ) | Overshoot (Mp) | Settling Time (Ts) | Error (Ess) |
KP | Decrease | Increase | Small Change | Decrease |
KI | Decrease | Increase | Increase | Decrease Significantly |
KD | Minor Decrease | Decrease | Decrease | No effect |
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 1, January-2014 2042
ISSN 2229-5518
B. Design of Fuzzy Logic Controller
Figure.2 shows the simulink model of the Fuzzy Controller with unity feedback.
IJFigurSe.2. simulink diagraEm of Fuzzy ControllRer
[1]. Fuzzy Membership Function
There are two fuzzification methods namely, Mamdani and Sugeno. Generally used Defuzzification methods are center of area, center of gravity, fuzzy clustering, first of maxima, last of maxima, mean of maxima, semi-linear Defuzzification, quality method, middle of maxima [4]. Centroid defuzzification method is used in this paper.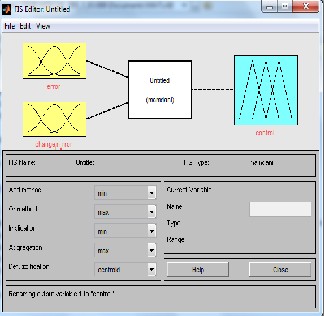
Figure.3. selection of I/O for designing FIS
In this paper two fuzzy membership functions are used for two inputs error and change in error and one output i.e. control as shown in Figure.3.
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 1, January-2014 2043
ISSN 2229-5518
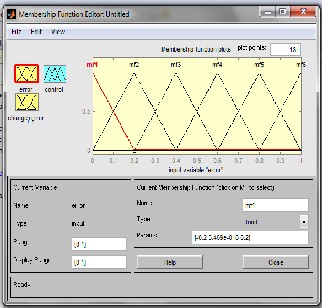
Figure.4. membership function editor for fuzzy controller
Figure.4 shows the fuzzy membership function editor where the number of membership function and type of membership function is choose, such as trapezoidal, triangular and Gaussian according to the process parameter. In this paper it is suitable to choose triangular and trapezoidal.
Figure.5. membership function for output
The fuzzy membership-function for the output parameters are shown in figure.6. Here
NB = Negative Big
NM = Negative Medium
NS = Negative Small
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 1, January-2014 2044
ISSN 2229-5518
Z = Zero
PB = Positive Big
PM = Positive Medium
PS = Positive Small
[2]. Fuzzy rules for Developing FIS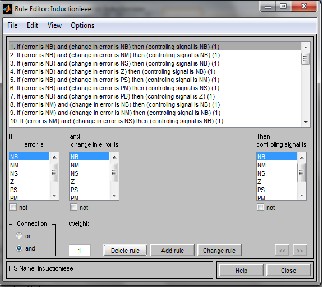
Figure.6. fuzzy rules for FIS
Fuzzy rules operate using a series of if- then statement. Figure.6 shows the fuzzy rules for developing FIS. The fuzzy
control rule is based on fuzzy decision making, which satisfies some input conditions and has an output results [11].
C. Design of PID-Fuzzy controller
Figure.7 shows the simulink model of the PID-Fuzzy Controller with unity feedback.
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 1, January-2014 2045
ISSN 2229-5518
Figure.7. simulink model of the PID-Fuzzy Controller
In PID-Fuzzy controller, the derivation and integration is made at the input of the fuzzy block.
IJSIV.SIMULATIEON RESULTS R
The figure 8, 9 and 10 shows the response of conventional PID controller, fuzzy logic controller and the response of PID-
Fuzzy to the step input.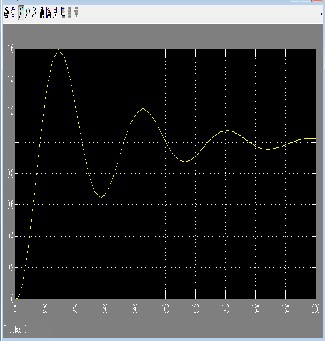
Figure.8. The step response of the PID controller
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 1, January-2014 2046
ISSN 2229-5518
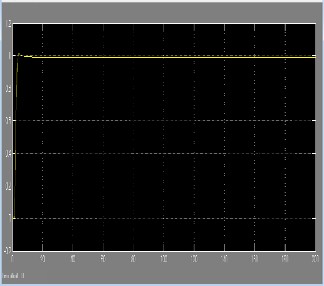
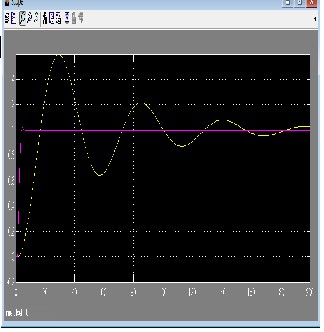
Figure.9. The step response of the fuzzy controller
IJSER
Figure.10. The step response of the PID-fuzzy controller
From figure 8, 9 and 10 it is clear that fuzzy logic controller has small overshoot and is having the fast response as compared to PD and PID Controllers.
CONCLUSION & DISCUSSION
In this paper, we design three kinds of controllers which is PID and fuzzy logic controller and PID-Fuzzy controller. From the figure, results shows that the response of PID Controller is oscillatory which can damage the system. But the response of
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 1, January-2014 2047
ISSN 2229-5518
Fuzzy Logic Controller is free from these dangerous oscillations in the transient period. Hence the proposed FLC is better than the PID controller.
REFERENCES
[1] Rahul Malhotra and Tejbeer Kaur, “DC motor control using fuzzy logic controller,” International journal of advanced engineering sciences and technologies vol no. 8, issue no. 2, 291 – 296.
[2] Philip A. Adewuyi, “DC Motor Speed Control: A Case between PID Controller and Fuzzy Logic Controller,” international journal of multidisciplinary sciences and engineering, vol. 4, no. 4, may 2013.
[3] Zhang Shengyi and Wang Xinming, “Study of Fuzzy-PID Control in MATLAB for Two-phase Hybrid SteppingMotor,” Proceedings of the 2nd International Conference On Systems Engineering and Modeling (ICSEM-13).
[4] Awang N.I. Wardana, “PID-Fuzzy Controller for Grate Cooler in Cement Plant,” IEEE transaction of fuzzy system, no.7, vol.
32, 2005, 1345-1351.
[5] Farhad Aslam and Gagandeep Kaur, “Comparative Analysis of Conventional, P, PI, PID and Fuzzy Logic Controllers for the
Efficient Control of Concentration in CSTR,”International Journal of Computer Applications (0975 – 8887) Volume 17– No.6,
IJSER
March 2011.
[6] D. Puangdownreong, T. Kulworawanichpong, S. Sujitjorn, Input weighting optimization for PID controllers based on the adaptive tabu search, 2004 IEEE Region 10 Conference D (2004) 451–454.
[7] Gaddam Mallesham and Akula Rajani, “ Automatic tuning of pid controller using fuzzy logic,” 8th International Conference on development and application systems Suceava, Romania, May 25 – 27, 2006.
[8] Gaurav and Amrit Kaur, “ Comparison between Conventional PID and Fuzzy Logic Controller for Liquid Flow Control:
Performance Evaluation of Fuzzy Logic and PID Controller by Using MATLAB/Simulink,” International Journal of
Innovative Technology and Exploring Engineering (IJITEE) ISSN: 2278-3075, Volume-1, Issue-1, June 2012.
[9] S.R.Vaishnav and Z.J.Khan, “Design and Performance of PID and Fuzzy Logic Controller with Smaller Rule Set for Higher
Order System,” Proceedings of the World Congress on Engineering and Computer Science 2007 WCECS 2007, October 24-
26, 2007.
[10] Elangeshwaran Pathmanathan and Rosdiazli Ibrahim, “Development and Implementation of Fuzzy Logic Controller for Flow
Control Application,” Intelligent and Advanced Systems (ICIAS), International Conference on Digital Object Identifier, pp.1-
6, 2010.
[11] Gaurav and Amrit Kaur, “Conventional PID controller and Fuzzy logic controller for Liquid flow control: Performance Analysis Using MATLAB/Simulink,” International Journal of Engineering Research & Technology (IJERT) Vol. 1 Issue 3, May – 2012.
[12] Sahil Chandan and Rahul Agnihotri, “Fuzzy logic Controller for Flowing Fluids,” International Journal of Advanced
Research in Computer Engineering & Technology Volume 1, Issue 4, June 2012.
[13] Chuen Chien Lee, “Fuzzy logic in control systems i.e. fuzzy logic controller,”IEEE Transactions on Systems, man and cybernetics, Vol 20, No.2, March/April 1990.
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 1, January-2014 2048
ISSN 2229-5518
[14] R. Manoj Manjunath,S, S. Janaki Raman ,” Fuzzy Adaptive PID for Flow Control System based on OPC,” IJCA Special Issue on “Computational Science - New Dimensions & Perspectives NCCSE”, 2011.
[15] R. Rajesh,“Fuzzy Logic Control - A Quick Review,” international journal of wisdom based computing, VOL. 1(1), 2011.
[16] Elangeshwaran Pathmanathan, Rosdiazli Ibrahim,” Development and Implementation of Fuzzy Logic Controller for Flow
Control Application,” Intelligent and Advanced Systems (ICIAS), International Conference on Digital Object Identifier, pp.1-
6, 2010.
IJSER
IJSER © 2014 http://www.ijser.org