INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 6, ISSUE 4, APRIL-2015
ISSN 2229-5518
656
Lens Detection System using
Optical Augmentation
Affiliate 1
Manpreet Kaur APIIT SD INDIA Panipat, Haryana
manpreetkaurnk03@gmail.com
Affiliate 2
Akshat Jain APIIT S.D. India Panipat, Haryana
akshat21jain@gmail.com
In this paper, the problem is formulated as the location of the fixed camera and is solved using optical augmentation. 6 IR LED system has been used to test the feasibility and accuracy of the method. To find and remove cameras from their fixed location to feel safe and secure, the researcher has paid attention in locating the lens of cameras. The results demonstrated that optical augmentation is successfully finding the location of the lens with minimum cost and lower energy.
—————————— ——————————
Everyday life seems so mundane with all the comfort present day technologies offer. We wake up in morning knowing that with the touch of a button, we can reach our loved ones across the globe. The advancement in technology has given us a lot of comfort to live life in a better way but these boons sometimes leads to different bane in the surrounding world. Video cameras are the result of advance technology, due to their small size they are very flexible to get fit in any other device without showing their presence. Further these devices with installed hidden video cameras work to capture the videos without anyone knowledge. Resulting in crime and blackmails which affects the mankind giving them mental stress, fear and frustration.
To untie this problem, the device Optical Detector (OD) device has been designed in order to detect the cameras by locating their positions in order to remove them from their fixed position, to have relaxation and safety.
Many times news has flashed on social networking websites “Twitter” and “Facebook” that hidden cameras and 2-way mirrors were found in trial rooms of shopping malls. Despite the news got ignored, the researcher perceived many cameras installed in malls and complexes. After investigation about the hidden cameras the researcher came to know that these are not only installed in trial rooms and public washrooms but also are used to capture the information of defense system, research laboratories and conference rooms. This news knocked the research mind and gave an idea to design such a device to trace the position of camera.
The ambition was to design such a device which would trace the lens of any camera effectively, so that user can observe the location accurately. Second thought was to make it cheaper so that everyone can purchase it. Last but not the least was to make it mobile and compact to carry it easily with long lasting battery.
To implement the research some objects were followed are mentioned below (1) Best practicable method to trace the location of lens? (2) Number of LEDs required to converse in order to get strong beam of reflection after striking back from lens? (3) Angle between the LEDs? (4) Detecting distance? (5) Arrangement of LEDs to consume less power?
The device works on the principle of optical augmentation which states that the light reflects back when it falls on the optical device. This method necessitated magnifying lens to produce a strong beam of light by converging IR LEDs. The device required to adjust near the eye for observing the reflection in the form of brightness when it would strike the lens. To have more brightness and ease to observe, magnifying lens of high power is used. IR LEDs are arranged in both, parallel and series, to consume less power and to run the battery for long time.
OD has proved a very valuable and cost-effective way to untie the mankind problem by sweeping the area. It could be used to trace any find of lens, especially in the field of security by marking out the position of hidden cameras. Practically, the device proved pragmatically and successfully by tracing the lens.
IJSER © 2015 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 6, ISSUE 4, APRIL-2015
ISSN 2229-5518
657
In this paper, the main purpose is to make out the position of the fixed hidden cameras to steadfast the difficulty of locating them. In order to steadfast this difficulty, high range of magnifying lens is used to observe the area wider and clear.
6 IR LEDs are connected in parallel and series, at angle of 600 to each other, outlining to the magnifying lens to consume less power. Light of these LEDs concentrate at a center of the lens by conversion process and produce a strong beam of light. This strong beam is used to trace the location of lens.
If the light strikes the optical device i.e. lens it will reflect back along with incident light. Through this reflection, brightness will appear at that spot of time. In order to eradicate fault observation, move the device to and fro, if the brightness is not stable, i.e. it is at a particular point and then the position of lens is traced otherwise vice versa. The research only work to make up the location of lens to avoid error.
Supply voltage = 9V
If connects all in series, led voltage = 1.5V Drop across each = 7.5V
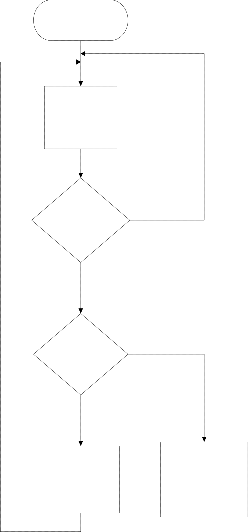
START
SCAN ROOM
BRIGHTNESS APPEAR
NO
MOTION
Due to high voltage drop, battery consume will be high
Actually the voltage across each LED should be 1/2th of supply voltage i.e.![]()
![]()
Calculated voltage = = = 4.5V
YES
NO CAMERA
LENS LOCATED
Practically, the result is 4.404V and ideally it is 4.5V because of voltage drop due to internal resistance of LED.
When all the LEDs are connected in parallel, they consume more power and battery gets weaken earlier, so to remove this problem, pair of three is made.
Fig. 1 shows the outline of optical detection system to show the correct observation signal of the lens.
Figure 1 Block diagram of optical reflection system
To comprehend and evaluate the basic key function regarding camera location, researcher has gone through many theories and research work. Hence, their conclusions are drawn below -
Excellent work done by [3] has improved the problem by the laser method. To trace the location, a ring of pulsating lasers is applied. The laser focuses on the lens of camera and observes its reflection. But this method only addresses CCD and CMS cameras because its initial detector works for this. It detects using radio wave between the range of 3 kHz to 300GHz as its transmission and recording type is up to 80 feet. All in all, the method is very luxurious and its communication is somewhat complex also.
Superb work done by [2] has presented a better way to locate the position of cameras by using flickering LED method. Initially to detect the camera, device uses Auto Sensitivity Tuner (AST), works for the particular range of frequencies
IJSER © 2015 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 6, ISSUE 4, APRIL-2015
ISSN 2229-5518
658
between 50MHz to 3GHz and has multi-channel scanner to eliminate noise in order to detect wireless camera. But using flickering LED is a risky as well as large time consuming method with less accuracy.
Brilliant work done by [4] has resulted with more feasibility in tracing the lens by using method of ultra-bright light. The method operates on the procedure of sweeping and reflection of light which is caused after striking the lens of cameras. Reflection appears in the form of brightness, work as indicator for the user. The device has additional feature of storing recorded images and videos by using its internal memory while sweeping the area. The technique is practicable but exclusive as it costs $ 39.99.
Tremendous work done by [1] has shown great result by using infrared signal and named it as Bud Detector. The main purpose of the device was to find surveillance systems which consist of cameras, cell phones, GPS and telephone monitoring devices. It operates on sweeping the entire room through red lens in order to trace the location of camera. 430 kHz to 300GHz is the range in which it operates but is very luxurious costs $ 799.95, not affordable to purchase for general person.
After reading these theories, articles and research papers conclusion was drawn that to trace the location of camera, firstly, sweeping of the area and secondly, striking back of light from the lens is obligation. So, the Researcher found that magnifying lens and IR LEDs are the best feasible and economical way to trace the position of the hidden cameras.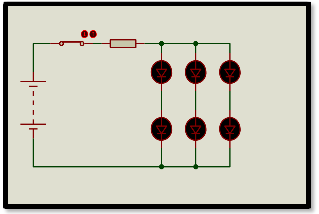
Fig. 2 shows the block diagram of optical detection circuit to control the power consumption with accurate result.
R1
Magnifying lens is used to view the area closer, clear and to test the feasibility and accuracy of the detection signal. Number of IR LEDs and angle between them plays vital role in the convergence of light to make it a single strong beam which is further send to locate the position of lens. For the system, main parameters are observed such as overall cost of the device, convenient to operate with full accuracy were studied and analyzed. While performing the real time demonstration, testing and troubleshooting was done to check the accuracy and feasibility in terms of optical detection. The method takes time to sweep the area for finding the lens but works best in terms of reliability.
Fig. 3 shows the terminal voltages at the point of IR LEDs.
330R
BAT1
9V
D1 D3 D5
LED-RED LED-RED LED-RED
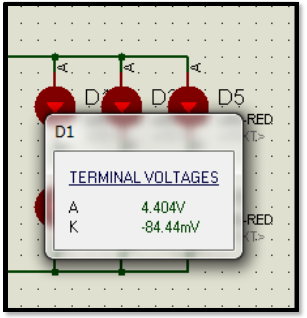
Figure 3 Block diagram of terminal voltage across IR LED1
Fig. 4 shows the terminal voltages at the point of IR LEDs.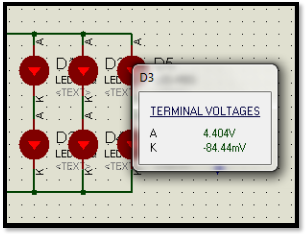
D2 D4 D6
LED-RED LED-RED LED-RED
Figure 2 Block diagram of optical circuit
The main objective was to make out the position of the lens. Hence, best suitable and practicable method found was optical augmentation principle. This principle also works on the reflection of light, to make this possible sweeping is required. This device does not initially detect the presence of camera. This only tackles to trace the location of any lens. This method takes time for sweeping but reduces cost along with more accuracy.
IJSER © 2015 http://www.ijser.org
INTERNATIONAL JOURNAL OF SCIENTIFIC & ENGINEERING RESEARCH, VOLUME 6, ISSUE 4, APRIL-2015
ISSN 2229-5518
659
Figure 4 Block diagram of terminal voltage across LED3
Above Fig. 3 and Fig. 4 shows the same terminal voltage across the IR LED-1 and 3 because pair of LEDs are connected in parallel to decrease the load over battery so that it runs for long period and convenient for user.
In this paper, a method has been untied by using reflected light striking from the lens and sweeping method to trace the location of the hidden camera through lens. The above result shows that the method is energy efficient, economic and practically feasible. After performing the real time demonstrating, it has been concluded that the method has worked successfully in the field of optical detection.
Optical augmentation has efficiently improved the job of detection by concentrating on the reflection of light. The overall cost was less with small size which makes it convenient to carry anywhere.
I would like to express my heartiest thankfulness to my creator for giving me good health and for such a great opportunity to see the project complete and working.
I would like to thank my supervisor Mr. Vijayendra Sharma for dedicating so much time of listening, correcting, supporting and encouraging me.
Heartily thanks to laboratory assistant, for their technical support, guidance, advice and patience in the project.
I would also like to thanks my family who give me a change to select this project and then supported me at every moment and time.
Last but not the least I would like to thanks my friends who offered remarkable support, aided in designing the layout and circuit diagram, collecting the proofs and related additional comments. God bless you.
[1] Collins, R. T., et al. (2000). Introduction to the Special Section on Video Surveillance. In IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE. Brisbane, Qld., 8
AUGUST 2000 . Brisbane, Qld.: IEEE CONFERENCE PUBLICATIONS. 745 - 746, VOL. 22.
[2] Hoffmeister, D., (2011). 3D TERRESTRIAL LASER SCANNING FOR FIELD CROP MODELLING. In Workshop on Remote Sensing Methods for Change Detection and Process Modelling. Victoria Lenz- Wiedemann and Georg Bareth, 18.-19.11.2010. Cologne, Germany: University of Cologne. 17-22.
[3] Jewitt, C. An introduction to using video for research. In National Centre for Research Methods Working Paper. London, 03/12. Cologne, Germany: Institute of Education. 1-26.
[4] Onoe, Y, (1998). Visual surveillance and monitoring system using an omnidirectional video camera. In Pattern Recognition, 1998. Proceedings. Fourteenth International Conference Brisbane, Qld., 16-20 Aug 1998. Taipei: IEEE CONFERENCE PUBLICATIONS. 588 - 592
Vol.1.
IJSER © 2015 http://www.ijser.org