The vehicle mechanical load is characterized by many torqueses, which are considered resistive. The different
International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 1322
ISSN 2229-5518
Akshay aggarwal
each wheel so that all wheels are supplied with the torque they need. The proposed control structure is based on the PID
control for each wheel motor. PID Control system is then evaluated in the Matlab/Simulink environment. Electronic
differential have the advantages of replacing loosely, heavy and inefficient mechanical transmission and mechanical
differential with a more efficient, light and small electric motors directly coupled to the wheels using a single gear reduction or an in-wheel motor.
—————————— ——————————
The heavy body including the structure and materials used in Electric Vehicle has always been a field of interest to designers. Their continuous research work to reduce the weight of the body has interested many people worldwide. The main attraction has always been reduction of body mass, including structure and form optimization or by adopting aluminum materials. Vehicles have seen an improvement on both motor design and control technology. Modern configurations
include motorized wheels, where motors are fitted in the wheels of EVs and thus improve air quality, reducing
the reliance on fossil fuels of power vehicles.
Here we ponder upon the use of Electronic Differential
(ED), replacing the conventional gearbox and the usual
configuration of EVs with only one traction-motor driving two wheels. It reduces the overall mass of an EV by replacing the conventional mechanical differential. Now the speed reference computation in the double- driven EV can be controlled by ED through the torque/rotation-speed curve of an electric motor which is almost perfectly adapted to the resistance-torque/speed curve of an electric vehicle. In case of curvilinear
trajectory or a lane change each wheel is controlled
through an ED in order to satisfy the motion requirements.
The vehicle mechanical load is characterized by many torqueses, which are considered resistive. The different
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 1323
ISSN 2229-5518
torques include: – The vehicle inertial torque defined by
the following relationship:
Fres = froll + faero + fslope
Froll = µ.mg
Faero = 1/2pCxSv2
Fslope =Mg.sinα
The main purpose of the electronic differential (ED) is to substitute the mechanical differential in multi-drive systems, providing the required torque for each driving wheel and allowing different wheel speeds.![]()
𝑑𝑤. 𝑡𝑎𝑛𝛿
∆𝑤 = 𝑤𝑟𝐿 − 𝑤𝑟𝑅 = 𝑤𝑉
𝐿𝑤
𝛿 > 0 ⇒ 𝑇𝑢𝑟𝑛 𝑅𝑖𝑔ℎ𝑡
𝛿 = 0 ⇒ 𝑆𝑡𝑟𝑎𝑖𝑔ℎ𝑡 𝑎ℎ𝑒𝑎𝑑
𝛿 < 0 ⇒ 𝑇𝑢𝑟𝑛 𝑙𝑒𝑓𝑡
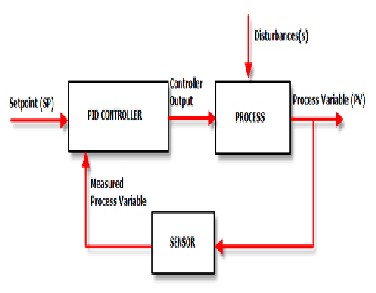
A proportional-integral-derivative controller (PID controller) is a family of controllers. They are the solution of choice when a controller is needed to close the loop and gives the designer a larger number of options and those options mean that there are more possibilities for changing the dynamics of the system in a way that helps the designer. A PID controller calculates an "error" value as the difference between a measured process variable and a desired set point. The controller attempts to minimize the error by adjusting the process control inputs.it takes the in wheel encoder values as feedback and will check it again and again in closed loop to reduce the error.![]()
𝑣𝐿 = 𝑤𝑉 �𝑅 +![]()
𝑑𝑤
�
2
𝑣𝑅 = 𝑤𝑉 �𝑅 −![]()
𝑑𝑤
�
2
𝑅 =![]()
𝐿𝑤
𝑡𝑎𝑛𝛿
PID controllers can be viewed as three terms - a proportional term which provides an overall control
𝑤𝑟𝐿 =
𝑤𝑟𝑅 =![]()
𝐿𝑤 + 𝑑𝑤 𝑡𝑎𝑛𝛿
𝐿𝑤![]()
𝐿𝑤 − 𝑑𝑤 𝑡𝑎𝑛𝛿
𝐿𝑤
𝑤𝑉
𝑤𝑉
action proportional to the error signal through the all
pass gain factor, and integral term, reducing steady state
errors through low frequency compensation by an
integrator and a derivative term, improving transient
response through high-frequency compensation by a
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 1324
ISSN 2229-5518

differentiator - added together. PID controllers are also known as three-term controllers and three-mode controllers.
Two DC hub motors are used in this case. The Electronic
control unit carries out the following basic tasks:
1. Reads the calibrated steering angle potentiometer
voltage and based on this it then calculates the steering
angle and also determines whether the vehicle is moving straight, turning left or right.
2 .Reads the throttle potentiometer voltage so that the desired vehicle speed is known.
3. Based on the above information, the ratio of the two
speeds VL/VR is calculated using the appropriate equation such as Equation shown earlier
4. A separate Pulse Width Modulated (PWM) signal is then applied to each of the two motors in accordance with the required speed ratio.
The above sequence is repeated at an extremely fast rate so that the ECU continues to make adjustments on a continuous basis
The CAN bus (controller area network) is a vehicle bus standard. It communicates with the microcontrollers and devices within a vehicle without a host computer. CAN bus is a message-based protocol, designed specifically
for automotive applications. CAN is a multi-master
broadcast serial bus standard for connecting electronic
control units (ECUs).
Here we are using embedded Atmel controllers family
with embedded can. CAN controller will help us to communicate within the vehicle up to a speed of 1 mbps without any host computer, to get the data from sensors at very high speed in serial communication. The can controller is designed in matlab.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 1325
ISSN 2229-5518
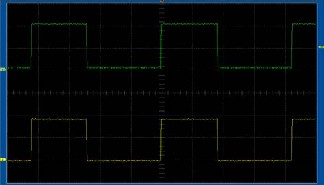
Initially when the throttle input is 1.7 volt.
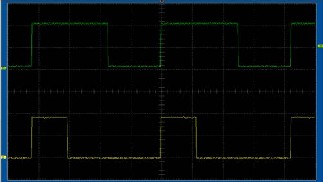
When steering wheel is turned left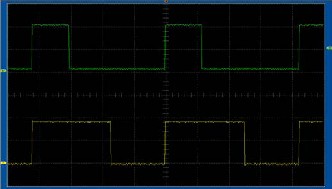
When the steering wheel turned right
In this paper, a PID controller has been used for an electronic differential to control two-independent-wheel drive electric vehicle. The electronic differential has been discussed over mechanical differential, proving it to be a better device with better features implemented in it. The results of the electronic differential system operated satisfactorily and that a two-wheel-individual drive electric vehicle can operate smoothly on both a straight or curved path using a PID closed loop control system.
1. Kada HARTANI, Mohamed BOURAHLA ,Yahia MILOUD, Mohamed SEKOUR ”Electronic Differential with Direct Torque Fuzzy Control for Vehicle Propulsion System” Vol.17, No.1, 2009©TUBITAK doi:10.3906/elk-0801-
2. P. Presage, R. Krishnan. “Modelling, Simulation, and Analysis of Permanent Magnets Motor Drives, Part I: The Permanent Magnets Synchronous Motor Drive,”IEEE Transactions on Industry Applications Vol.25, no.2, 265-273, 1989.
3.K.H. Nag, G. Chang, Y. L: PID Control System Analysis, Design and Technology, IEEE Transaction on Control System Technology, Vol. 13, No. 4, July 2005, pp. 559 – 576
4. Milliken, F.W.; Milliken, D.L.: ‘Rave Car Vehicle
Dynamics’, SAE International, 1995.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 1326
ISSN 2229-5518
5. R.E. Colyer et al., “Comparison of steering
geometries for multiwheeled vehicles by
modelling and simulation,” in Proceedings of
IEEE CDC'98, vol. 3, pp. 3131-3133, December
1998.
6. A. Ece Hartavi et al., “Signal interfacing for hybrid electric vehicular electronics and an implementation study,” in Proceedings of the IEEE ICVES’08, Columbus, OH (USA), pp. 151-
156, September 2008.
IJSER © 2013 http://www.ijser.org