International Journal of Scientific & Engineering Research, Volume 6, Issue 5, May-2015 264
ISSN 2229-5518
Design and Implementation of Remote Operated
UGV Based on GSM
Maha sharks, M.S.Zaghloul and Ahmed mohsen
—————————— ——————————
Today Surveillance, search and rescue are great risk for humans, In order to minimize direct human intervention in such operations. The design of a remotely operated versatile Unmanned Ground Vehicle (UGV) mounted with a robotic manipulator is essential. The robustness, range and security of the communication link between the remote base station and the UGV, obstacle avoidance must be taking into consideration. Taking the surrounding environment readings by a large number of sensors and process these data to form a clear picture to achieve the greatest benefit of UGV. The real time control is one of the major issues encountered while deploying such UGVs in the above scenarios. In this paper, the design of a versatile UGV which leverages the already existing GSM mobile telephony network to establish a long range [1]. Secure, fast and reliable connection with the remote base station was presented. The UGV is also mounted with a robotic manipulator with four degrees of freedom with a gripper type end-effectors, which can be used for grabbing objects and thus help in search and rescue type operations. The robot is equipped with IR sensors and camera for obstacle detection and avoidance. The camera is also used to send the visual information back to the base station in real-time, allowing accurate control of and monitoring over long distances. Figure 1 shows the core components of unmanned ground vehicle.
It is very important in mechanical design of the UGV to be according to the application to maximize its performance.
There are numbers of factors to be considered before we move to mechanical design [2].These parameters are defined from application perspective each design has its own advantages and disadvantage. For example, consider a military based UGV for the surveillance purposes, now the mechanical design should be rugged to withstand the harsh environment. It should be able move in the off-road environment and agility is also a very dominant design factor, a differential drive could be implemented for that
purpose. We are using a robust all-terrain mechanical
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 5, May-2015 265
ISSN 2229-5518
chassis as the platform for our UGV which has off-terrain rugged wheels and a decent suspension system. A DC motor with gear box is used to drive both of the rear wheels as shown in figure 2. The first steps of the design consisted on evaluating the existing Quad by analyzing the different functions to be automated and measuring the available space for mounting the required motors and drives. Several design configurations were developed and evaluated that lead to the selection of an optimal configuration that was implemented. Mechanical design consist of two major component that will be disused briefly.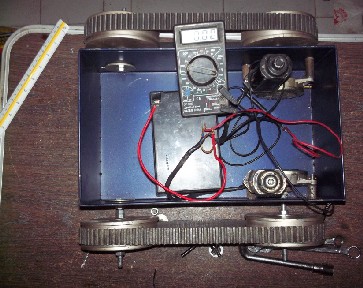
There are a lot of materials used for Unmanned ground vehicles. The chosen material is aluminum with allowed thickness 1mm because of light weight, possible capability and easy formation .The proposal base shape is cubic of dimensions 370*250*120mm with efficient space for wheel system, motors, gearbox, and other systems. Rugged protection of sensitive electronics where done by using special coating.
Four wheels with 150mm diameter and 10mm edges of the sides to grip on course to tighten control every two wheel as one motion on each side. For forward motion the rear wheels moves forward so whole UGV moves to forward, for backward motion the rear wheels moves backward so whole UGV moves to back ward. To turn to left rear left
wheel stop working and act like Focal point and right
wheel keep moving so UGV whole moves to left. To turn to right rear right wheel stop working and act like focal point and left wheel keep moving so UGV whole moves to right.
Electrical design includes the basic electrical components in UGV to provide the efficiency for operation and control. [3][4]. The main requirement for electrical design are to extend operating time, provide constant reliable voltage to motors and other electronics, condense power supply into a single unit and deep-cycle battery.
Sensing technology has been widely investigated and utilized for every type of sensors. Due to the different applicability and inherent limitations of different sensing technologies, a sensor is a technological device that detects
/ senses a signal, physical condition and chemical compounds. It is also defined as any device that converts a signal from one form to another [5]. Sensors are mostly electrical or electronic .Sensing methods based on electrical variation is discussed through further classification according to sensing materials, we will talk about sensors and modules used in our unmanned ground vehicles.
The camera shown in figure 3 is In front of the car which Characterized with a CCD sensor for shooting a wide dynamic range is employed to perform progressive or interlace scanning, and images with a wide dynamic range are obtained by a newly developed image signal processor (Wide Dynamic Range function). Furthermore, it is possible to automatically switch to this wide dynamic range function, which enables to obtain optimal images ranging from the dark areas of a subject to the light areas.
The Low-noise images can be obtained even in low light environments using the 3D noise reduction (3D NR + 2D
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 5, May-2015 266
ISSN 2229-5518
NR) function, the Infrared vision for dark environmental conditions and the dust and waterproof for different environmental conditions.
This module is sensitive to the flame and radiation. It also can detect ordinary light source in the range of a wavelength from 760nm-1100 nm as shown in figure 4. The detection distance is up to 100 cm. The flame sensor can output digital or analog signal. It can be used as a flame alarm or in firefighting UGV. This has specification of detects a flame or a light source of a wavelength in the
range from 760nm-1100 nm.
• Detection distance: 20cm (4.8V) ~ 100cm (1V)
• Detection angle about 60 degrees, it is sensitive to the
flame spectrum.
• Comparator chip LM393 makes module readings stable.
• Adjustable detection range.
• Operating voltage 3.3V-5V
• Digital and Analog Output
• DO digital switch outputs (0 and 1)
• AO analog voltage output
• Power indicator and digital switch output indicator
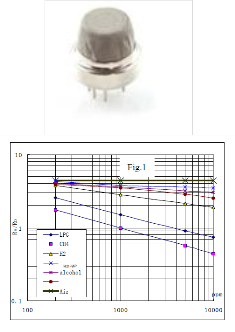
Gas sensor measures the concentration of gas in its vicinity. Gas sensor interacts with a gas to measure its concentration. Each gas has a unique breakdown voltage i.e. the electric field at which it is ionized. Sensor identifies gases by measuring these voltages. The concentration of the gas can be determined by measuring the current discharge in the device. The usage gas sensor is Methane CNG gas sensor - MQ-4 as shown in figure 5. It is simple-to-use compressed natural gas (CNG) sensor, suitable for sensing natural gas (composed of mostly Methane [CH4]) concentrations in the air. The MQ-4 can detect natural gas concentrations anywhere from 200 to 10000 ppm with a very high sensitivity and fast response.
Tri-Axis Accelerometer is an integrated module that can sense gravitational (g) force of ±3g on three axes (X, Y, and Z) as shown in figure 6. So it helps to detect Movement, Speed and using time factor the distance covered in a motion in three directions. GPS Module able to locate UGV exact position within a few meters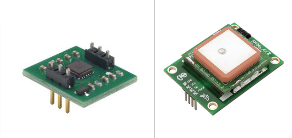
By written the coding and usage concept of GSM communication][6][7] we can fully controlling the UGV. and using microcontroller Atmel16 family attach with DTMF circuit and motor drivers as shown in figure 7
.Sensors and modules, flame sensors, gas sensor ,GPS, and
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 5, May-2015 267
ISSN 2229-5518
accelerometer module are also connected to AVR
microcontroller .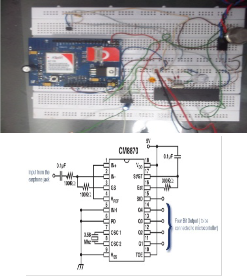

DTMF decoder converts the frequency of each tone to digits
.the output DTMF circuit is an input for AVR microcontroller which controlled the motor driver [8][9]. Figure 8 shows block diagram for the main component of UGV.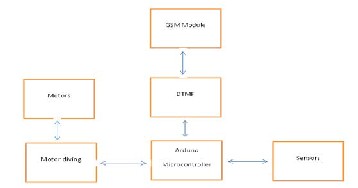
By using the microcontroller and motor driving circuit shown in figure 9. and measuring experimental values of the frequencies of sinusoidal waves for DTMF and voltage level at the output pins of MT8870 and Atmega16. These values are in the Table 1 and 2 respectively. Table 2 shows the HEX reading obtained from output pins of MT8870 and Atmega 16.and by using this values we can reach to final product as shown in figure 10.
KEY Low High | |||
NUMBER | frequencies(HZ) | frequencies (HZ) | |
2 | 672 | 1320 | |
4 | 731 | 1201 | |
5 | 735 | 1325 | |
6 | 731 | 1475 | |
8 | 855 | 1322 |
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 5, May-2015 268
ISSN 2229-5518
5 | 0101 | 0101 | 0X00 | stop |
6 | 0110 | 0110 | 0X02 | Right turn |
8 | 1000 | 1000 | 0X05 | Backward |

The software design written by micro C and shown in
Appendix A.
We were able to design and implement of UGV based on GSM communication controlling system. The proposed system is used in surveillance and military life.The advantage of designed UGV from other systems is motion system, stabilization, security by using inception in GSM, long rang wireless communication. And controlling algorithm has been also developed. As future works, we can develop the actual hardware of UGV motion and controlling by using modified mechanical design and communication technique.
[1]Binoy B. Nair , Abhinav Kaushik ,T. Keerthana , Aswathy Sathees , P. Rathnaa Barani , Aswathy S. Nair “A GSM-based Versatile Unmanned Ground Vehicle” in proceedings of 978-1-4244-9005-9/102010 IEEE.
[2] Veera Jawahar Vibeeshanan, Kamesh Subbarao, and Brian L. Huff “A Sensor Calibration Methodology for Evidence Theoretic Unmanned Ground Vehicle Localization” in Proceedings of the 2007 IEEE International Symposium on
Computational Intelligence in Robotics and Automation
Jacksonville, FL, USA, June 20-23, 2007.
[3] Thanga kuma rJeyaprakash ,Rajeshwari Mukesh“ A Tactical Information Management System for Unmanned
Vehicles Using Vehicular Adhoc Networks”in Proceedings of the4th International Conference on Intelligent Systems, Modelling and Simulation 2013.
[4] Ki Sang Hwang ,Kyu Jin Park , Do Hyun Kim ,Sung-Soo Kim , Sung Ho Park “Development of a Mobile Surveillance Robot” in Proceedings of the International Conference on Control, Automation and Systems 2007 Oct.
17-20, 2007 in COEX, Seoul, Korea.
[5] Kie-Soon Park ,Chang-Sup Kim , Young-Jin Lee , Jong- II Bae , Man-Hyung Lee “Development of an Unmanned Vehicle Driving System” in Proceedings of the0-7803-6456-
2/00/©2000 IEEE
[6] Jae Cheon Leeand Dong Myung Lee “Development of Autonomous Vehicles for Urban Driving” in Proceedings of theICROS-SICE International Joint Conference
2009August 18-21, 2009, Fukuoka International Congress
Center, Japan.
[7] Hee Chang Moon, Jae Cheon Lee, Jung Ha Kim, and
Dong Myung Lee, Member, IEEE “Development of
Unmanned Ground Vehiclesavailable of Urban Drive”in
Proceedings of the2009 IEEE/ASME International
Conference on Advanced Intelligent MechatronicsSuntec
Convention and Exhibition CenterSingapore, July 14-17,
2009.
[8] L.-D. Chou, C.-C.Lee, M.-Y.Lee, C.-Y.Chang, “ATour
Guide System for Mobile Learning in Museums ”.
Proceedings of IEEE WMTE 2004 -- the 2nd IEEE
International Workshop on Wireless and Mobile Technologies in Education, Taipei, Taiwan, R.O.C., Mar.2004.
[9] Abdelhafid B.,Necar M., Mansour A, Mostafa E,. “Design and Implementation of an Unmanned Ground Vehicle for Security Applications” 7th International Symposium on Mechatronics and its Applications (ISMA10), Sharjah, UAE, April 20-22, 2010.
#include <avr/io.h> //standard I/O functions for
ATMega16
int main(void)
{
unsigned int k;
DDRA= 0x00; // All pins of PORTA assigned as INPUT
DDRD=0xFF; // All pins of PORTD assigned as OUTPUT
PORTD=0x00; // All pins made to exhibit LOW state
initially
while (1) // Infinite Loop
{
k=PINA; //Read Input from PINA
switch (k)
{
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 5, May-2015 269
ISSN 2229-5518
case 0x02: //BOT Moves forward
{
PORTD=0x0A; // Both Motors in Forward Direction
break;
}
case 0x08: // BOT Moves backward
{
PORTD=0x05; // Both Motors in Backward Direction
break;
}
case 0x04: //BOT Moves Left
{
PORTD=0x08; // RM-Forward and LM-Stop
break;
}
case 0x06: // BOT Moves Right
{
PORTD=0x02; // LM-Forward and RM-Stop
break;
}
case 0x05: // BOT Stops
{
PORTD=0x00; //Both left and right motors halt
break;
}
}
}
}
IJSER © 2015 http://www.ijser.org