
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 699
ISSN 2229-5518
G.U.Priyanga, T.Sangeetha, P.Saranya, Mr.B.Prasad
Acoustic noise problem becomes more serious, because of increasing numbers of industrial equipment such as engines, blowers, fans, transformers, and compressors are in use. The traditional passive earmuffs are valued for their high attenuation over a broad frequency range. However, they are relatively large, costly, and ineffective at low frequencies. Active noise control (ANC) system cancels the unwanted noise based on the principle of superposition. Specifically, an anti noise of equal amplitude and opposite phase is generated and combined with the primary noise, thus resulting in the cancellation of both noises[3]. The ANC system efficiently attenuates low frequency noise where passive methods are either ineffective or tend to be very expensive or bulky. ANC is developing rapidly because it permits improvement in noise reduction, which results in potential benefits in weight, volume, and cost[1]. Current research in ANC for communication and entertainment headsets focuses on using feed forward
technology . In practice,
however, the feed forward ANC systems for headsets have significant stability and performance deficiencies caused by non-stationary reference inputs, measurement noise, and acoustic feedback[4]. In response to these issues, an adaptive feedback
ANC system is developed here for an integrated audio and
communication headsets as shown in fig.1
--------------------------------------------------------------------------
GU Priyanga, T.Sangeetha, P.Saranya-UG Students, K.S.Rangasamy college of technology, Tiruchengode, Namakkal priyakrishece08@gmail.com
Mr.B.Prasad- Guide, Assistant Professor, K.S.Rangasamy college of technology, Tiruchengode, Namakkal
Fig.1 Integrated audio and ANC system
Impulse noises exist in many real applications, such as stamping machines in manufacturing plants, IV pump sounds in the hospital. LMS algorithm is best to avoid such noises. A new modified FXLMM algorithm is also proposed to achieve better performance in controlling impulsive noise[8]. Computer simulations are carried out for all the three algorithms (FXLMS, FXLMM and modified FXLMM) and the results are analysed[8].
The LMS Filter block can implement an adaptive filter using five different algorithms. The block estimates the filter weights, or coefficients, needed to minimize the error, e(n), between the output signal y(n) and the desired signal, d(n).The signal that we want to filter is connected to the
input port. The input signal can be a scalar or a column
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 700
ISSN 2229-5518
vector. The desired signal is connected to the Desired port. The desired signal must have the same data type, complexity, and dimensions as the input signal. The Output port outputs the filtered input signal, which is the estimate of the desired signal. The Error port outputs the result of subtracting the output signal from the desired signal.
When we select LMS for the Algorithm parameter, the block calculates the filter weights using the least mean- square (LMS) algorithm. This algorithm is defined by the following equations.
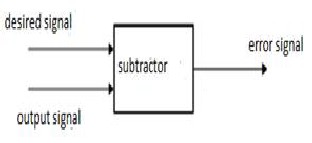
Fig.2 Process undergoing in LMS filter
In an ANC application, the primary noise is not available during the operation of ANC because it was cancelled by the secondary noise. Therefore, the basic idea of an adaptive feedback ANC is to estimate the primary noise and use it as a reference signal for the ANC filter[4]. An adaptive feedback ANC system is required for applications include spatially incoherent noise generated from turbulence, noise generated from many sources and propagation paths, and induced resonance where no coherent reference signal is available.
We can integrate the above feedback ANC with the receiving audio input to form an Integrated Feedback Active Noise Control (IFBANC) system. In IFBANC, the residual noise picked up by the error microphone is used to synthesize the primary noise for updating the adaptive filter coefficients using the FXLMS algorithm. Since the IFBANC is integrated with the existing audio playback
systems (such as walkman or Mp3 players) or
communication headsets, the microphone placed inside the ear cup picks up both the residual noise and the desired audio signal as shown in Fig.3. The audio components will also become the interference to the IFBANC algorithm and a method is devised to neatly combine the audio and the ANC systems.
Fig.3 Integrated feedback ANC system
The spectral filtering of a sound source that is caused primarily by the outer ear (pinna) will affect the secondary- path transfer function . The asymmetrical, complex construction of the outer ears cause a unique set of delays, resonances, and diffractions that collectively translate into a unique transfer function for each microphone position . Intensive experiments were conducted to find the optimum location for the design of the AFANC headphone. The sampling frequency chosen for the measurements is 8 kHz, and the frequency range of interest being between 0–3.38 kHz. As illustrated in Fig. 3, the secondary path estimation is conducted for eight different error microphone locations on the median plane around the ear-pad of the headphone. The positions #6, #7, and #8 are clearly identified.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 701
ISSN 2229-5518
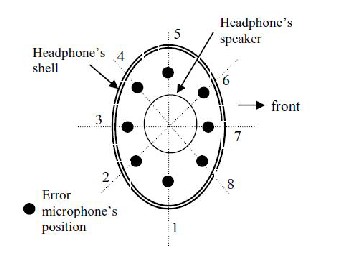
Fig.4 Different positions for the placement of error microphone
It was observed that the system showed the flattest frequency response with least number of dips and peaks at the microphone locations #8. Since position #8 is near the external auditory meatus, the microphone could fit in more easily inside the hollow in that location.

The noise reduction headset is implemented using the Adaptive feedback active noise control mechanism. The system is more compact, consume less power and ease of integration with existing audio and communication system. It works on the Superposition principle. Anti noise that has the equal magnitude as that of the original signal but opposite in phase is generated and combined with primary noise that result in the cancellation of noise. ANC system attenuates low frequency noise that cannot be eliminated using the passive headsets.
Fig.5 Basic block diagram of proposed system
The filter length of the adaptive system is inherently tied to many of the other performance measures. The length of the filter specifies how accurately a given system can be modeled by the adaptive filter. In addition, the filter length affects the convergence rate, by increasing or decreasing computation time, it can affect the stability of the system, at certain step sizes, and it affects the minimum MSE. If the filter length of the system is increased, the number of computations will increase, decreasing the maximum convergence rate. Conversely, if the filter length is decreased, the number of computations will decrease, increasing the maximum convergence rate. For stability, due to an increase in length of the filter for a given system, you may add additional poles or zeroes that may be smaller than those that already exist. In this case the maximum step size, or maximum convergence rate, will have to be decrease to maintain stability. Finally, if the system is under specified, meaning there is not enough pole and/or zeroes to model the system, the mean square error will converge to a nonzero constant. If the system is over specified, meaning it has too many poles and/or zeroes for the system model, it will have the potential to converge to zero, but increased calculations will affect the maximum convergence rate possible.
MATLAB was used to simulate the hardware portion of the study. In order to simulate properly, the same microphone used in hardware must be used to record various noises. The first consisted of simulating the inversion of noise and adding two signals destructively. The second test consisted of creating filters so retain or remove specific frequencies. The test involved adaptive filters using the least mean squares methods.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 702
ISSN 2229-5518
 Fig.8 Waveform of exterior mic input to LMS filter
Fig.8 Waveform of exterior mic input to LMS filter
Fig.6 Simulink model of proposed system
The Waterfall window displays the behavior of the adaptive filter's filter coefficients. It displays multiple vectors of data at one time. These vectors represent the values of the filter's coefficients of a normalized LMS adaptive filter, and are the input data at consecutive sample times. The data is displayed in a three-dimensional axis in the Waterfall window.
Fig.9 Output waveform
Fig.7 Waveform of pilot mic input to LMS filter
The model was executed and the above mentioned output waveforms were obtained. The upper port (exterior mic) of the Acoustic Environment subsystem is white noise. The signal output at the lower port (pilot's mic) is composed of colored noise and a signal from a .wav file. This demo model uses an adaptive filter to remove the noise from the signal output at the lower port. When we run the simulation, we hear both noise and the music in .wav format. Over time, the adaptive filter in the model filters out the noise so we only hear the music without noise.
An integrated feedback ANC algorithm has been presented in this paper to reduce the interference without cancelling out the desired audio signal. The integrated
structure of the IFBANC system, enable a cheaper solution
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 703
ISSN 2229-5518
in a digital signal processing based platform. In addition, only a single microphone per head cup can produce a more compact system. We investigated the performance of the IFBANC system using different disturbing noise sources and found that in general, this system provides a good noise cancelling performance. There are several novel features built into this integrated system, which include updating of the secondary path and using a difference error to update the adaptive filter. These features provide a robust implementation and faster adaptation to changes in the headsets transfer function. The active noise cancelling system can be implemented using the hardware DSP TMS320c54x processor.
DSP modules can be purchased and the codings can be downloaded . Then the module can be fixed to the commercial headsets. The error microphone is attached to the ear muff and the two microphone inputs can be given to the module so that the compact active noise control headset can be built.
[1] Cheng-Yuan Chang and Sheng-Ting Li,” Active noise control in headset by using low cost microcontroller,” IEEE trans. on industrial electronics, vol. 58, pp. 1936-1942, May
2011.
[2] F.Li and Yuanjin Zheng,” An adaptive filtering algorithm for direct-conversion receivers: architecture and performance analysis,” IEEE trans. on circuits and systems, vol. 55, pp. 1141-1148, May 2008
[3] Sen M. Kuo, Sohini Mitra, and Woon-Seng Gan,” Active noise control system for headphone application,” IEEE trans. on control systems technology, vol. 14, pp. 331-335, May 2006.
[4] Woon S.Gan, Sohini Mitra and Sen M. Kuo,” Adaptive
feedback active noise control headset Implementation, evaluation and its extensions,” IEEE trans. on Consumer Electronics, vol. 51, pp. 975-982, May 2005.
[5] Ying Song, Yu Gong, and Sen M. Kuo,” A robust hybrid
feedback active noise cancellation headset ,” IEEE trans. on speech and audio processing, vol. 13, pp. 607-617, May
2005.
[6] Woon Seng Gan ,Sen M. Kuo and Kevin Kuo,”Active
Noise Control: Open Problems and Challenges,” 978-1-
4244-6878-2/10/$26.00 ©2010 IEEE, pp. 164-169.
[7] F.Li and Ji Ming,” Robust Speaker Recognition in Noisy Conditions,” IEEE trans. on audio, speech, and language processing, vol. 15, pp. 1711-1723, July 2007.
[8] Peng Li and Xun Yu,” Comparison study of active noise
cancelation algorithms for Impulsive noise,” IMECE2011-
63925.
[9] Scott Pigg and Marc Bodson,” Adaptive Algorithms for the Rejection of Sinusoidal Disturbances Acting on Unknown Plants,” IEEE trans. on control systems technology, vol. 18, pp. 822-836, July 2010.
[10] F.Li and Ankush Goel,” Active Cancellation of
Acoustic Noise Using a Self-Tuned Filter,” IEEE trans. on circuits and systems—I, vol. 51, pp. 822-836, November
2004.
IJSER © 2013 http://www.ijser.org